





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于无人机倾斜摄影的三维露头地质建模:以山西吕梁市坪头乡剖面为例*
[印森林1  , 谭媛元
, 谭媛元2 , 张磊3 , 冯伟1 , 刘善勇1 , 晋静2 ]
, 谭媛元|
|

第一作者简介 印森林,男,1983年生,毕业于长江大学,在中国石油大学(北京)获得博士学位。现为长江大学录井技术与工程研究院副教授,硕士生导师,主要从事油气田开发地质方面研究。E-mail: yinxiang_love@126.com。
针对野外露头地质知识库数据获取方法存在的不足,利用无人机倾斜摄影的敏捷、全局性视角及定量化程度高的特点,对山西吕梁市坪头乡剖面野外露头数据进行了采集、处理与地质解释,建立了野外露头区地质知识库,并以此为基础建立了典型区块野外露头内部三维地质模型。研究表明: ( 1)无人机倾斜摄影采集处理后数据模型具有三维坐标(经度、纬度和海拔)及对应的图像信息,可以准确定位并测量任意位置点坐标,为建立精准的地质知识库奠定了良好的基础;( 2)对露头区储集层骨架与地质统计学参数进行了统计,建立了典型露头区地质知识库,主要包括储集层成因、砂体连续性与规模、砂体数量与相对比例、砂体几何形态和变差函数等参数;( 3)在虚拟井位设置、岩性标定和储集层地质知识库的指导下,利用地质统计学变差函数的方法,建立了典型露头区三维地层-构造模型和 2套岩性模型,模型与地质认识较为一致。
About the first author Yin Sen-Lin,born in 1983,is an associate professor of the Institute of Mud Logging Technology and Engineering of Yangtze University,with a Ph.D. degree obtained from the China University of Petroleum(Beijing). Now he is mainly engaged in researches and teaching of reservoir geology,reservoir characterization and 3D geological modeling. E-mail: yinxiang_love@126.com.
The conventional data acquisition methods of outcrop knowledge database have many limitations. The unmanned aerial vehicle(UAV)oblique photography,however,has many advantages including agility,global perspective and high quantificational degree,and therefore was used in this study to collect,process,and interpret the outcrop data of Pingtouxiang section in Lüliang City Shanxi Province. By establishing an outcrop geological knowledge database,a 3D outcrop geological model was developed. Main findings of this study were summarized as follows. (1)The data model developed after UAV oblique photography acquisition and processing has 3D coordinates(latitude,longitude,altitude),and contains corresponding image information. This allows the coordinates of any position to be accurately determined,providing a solid foundation to develop a precise geological knowledge database. (2)The architecture and geostatistical parameters of the outcrop reservoir were statistically analyzed,and a typical geological knowledge database of the outcrop area was developed. Main parameters in the database include formation mechanisms of reservoirs,the continuity,dimension,number,proportion,geometry,and variations of sand bodies, etc.;(3)According to the setting of virtual well location,lithology calibration,and reservoir geological knowledge database,a typical 3D stratigraphic-structural model and two sets of lithological models in the outcrop areas were developed using the geostatistical variogram function.
随着油气田勘探开发的深入, 一方面, 储集层表征向建立三维定量的地质模型方向发展, 另一方面储集层沉积学定性、半定量的知识正快速向定量化地质知识库方向发展(裘亦楠, 1992)。目前, 地质知识库中的经验知识数据主要来源于现代沉积区、密井网区和野外露头区, 各区因资料尺度差异而不同(陈恭洋, 2000)。与现代沉积与密井网相比, 野外露头具有与地下地层岩性特征一致、观察直接、取样相对简易的优点。因此, 野外露头研究受到了学者们的广泛关注, 对其建立地质知识库的工作开展时间最久, 不同沉积类型知识库的内容丰富, 取得了很大进展, 从盆地边缘的冲积扇露头(Yin et al., 2013; Jason and Dylan, 2016), 到辫状河(于兴河和王德发, 1997; 于兴河等, 2004; 朱卫红等, 2016)、曲流河(王越和陈世悦, 2016)及不同类型的三角洲(浅水三角洲、扇三角洲)(张昌民等, 1996; 贾爱林等, 2000; Jiao, et al., 2004; 印森林等, 2014a; 付晶等, 2015)、湖盆深水重力流沉积(吕奇奇等, 2017)及海底扇沉积体(Vitor et al., 2003)露头等均有涉及, 碳酸盐岩生物礁露头也受到关注(罗平等, 2003)。总结学者们对露头研究的主要进展有以下3点: (1)分析了露头区不同沉积体及其亚类的岩相构成及其分布(焦养泉等, 1993); (2)表征了露头区不同级次储集层非均质性, 包括储集层结构与储集层质量的非均质性(陈鑫, 2010; 印森林等, 2014b); (3)探讨了露头区的沉积体储集层构型模式及知识库(贾爱林等, 2003; 陈程等, 2006; 石书缘等, 2012; 邢宝荣, 2014; 张文彪等, 2015)等。
从表征的技术上来说, 野外露头表征技术从传统的人工拍照、比例尺估算测量、取样分析、二维非规则剖面研究, 逐渐被一些新的技术所取代。例如: 在测量上更加精准的全站仪(郭宗河, 2001)、表征露头岩性特征的伽马测量仪等。随着技术的进步, 利用Google软件解析大尺度的地质体(石书缘等, 2016; 张昌民等, 2017), 三维激光扫描表征野外露头小尺度的砂体结构(朱如凯等, 2013); 为了更加进一步深入认识露头内部的砂体结构(构型), 探地雷达等先进技术得到了广泛的应用(Woodward et al., 2003; 曹淞等, 2016)。技术的不断更新让学者们日益获取了更加精准、丰富的地质知识库信息。然而, 在当代信息采集、传输及处理解释飞速发展情况下, 前述的技术方法依然具有局限性, 例如, 探地雷达技术是研究露头内部砂体结构的重要手段, 但是很多露头区表面树木林立、高陡难攀, 仪器无法贴近露头区地表测量, 同时其对露头的测量具有多解性。这些均导致了野外露头研究具有“ 横看成岭侧成峰, 远近高低各不同” 的特点, 离真正的三维数字露头还相去甚远。另一方面, 三维地质建模技术取得了较大进展, 从确定性建模到随机建模进而发展了多点地质统计学建模方法(吴胜和和李文克, 2005), 综合多学科信息和融合多算法以建立更加逼近地质真实的模型(赵磊等, 2017)。然而, 这个过程中数据信息的多少一直是控制地质模型精准性的关键因素, 野外露头剖面数据信息量较大, 但因缺乏准确的剖面定位信息来定量表征二维非规则关联的露头区剖面, 而难于充分利用, 主要以观察描述及典型剖面的二维表征和建模为主(印森林等, 2013)。
基于以上技术手段的不足, 本次引入了基于无人机倾斜摄影的数字露头表征技术。无人驾驶飞机简称“ 无人机” (unmanned aerial vehicle), 英文缩写为“ UAV” , 是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。目前, 无人机技术在军事(包战和王树文, 2017)、城市规划(弥永宏等, 2017)、农林(杨陆强等, 2017)及其他行业(毕凯等, 2015; 王涵, 2017)得到了较好的应用, 文献调研发现, 王越和陈世悦(2016)对二叠系下石盒子组与上石盒子组曲流河及山西组辫状河进行了露头描述及表征, 提出了相应的构型模式, 而对于太原组则研究较少。因此, 作者拟探讨把无人机倾斜摄影技术引入到野外地质工作中来, 利用无人机的敏捷、全局性视角、高精度和定量化的特点开展野外露头考察及相关研究工作, 建立更加符合地下实际情况的地质知识库, 这不仅对拓展沉积学及三维地质建模具有重要理论意义, 同时对指导油气田精细勘探开发具有重要的实践意义。
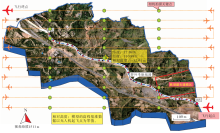
研究剖面(坪头乡剖面)野外露头区位于山西省吕梁市坪头乡镇, 该剖面自下而上发育了上奥陶统马家沟组(O3m)、中石炭统本溪组(C2b)、下二叠统太原组(P1t)和山西组(P1s)以及上二叠统上石盒子组(P2sh)(图1); 考察线路总长约为15 km, 共计46点, 总时长约10 h。与此同时, 无人机巡航并行工作露头数据采集, 耗时约为1 h。
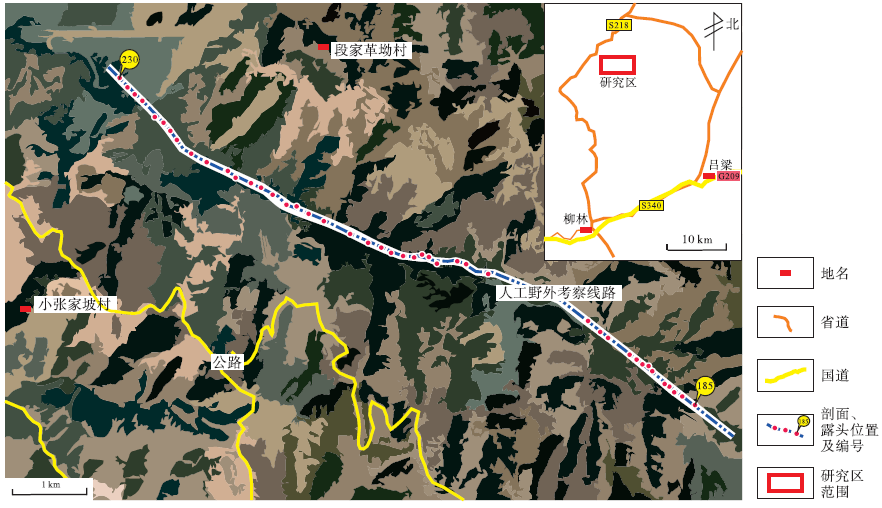 | 图1 山西吕梁市坪头乡剖面野外露头区位置Fig.1 Outcrop location of Pingtouxiang section in Lü liang City, Shanxi Province |
本研究基于大量的传统野外工作、无人机倾斜摄影露头数据采集、处理及解释新技术和大量文献资料, 共踏勘野外点位约80个, 人工重点考察46个点位并收集露头照片约500张, 利用无人机倾斜技术对研究区约0.6 km2露头数据进行了采集。采集数据包括三维点云数据与海量的倾斜摄影照片数据(约2000张), 随后, 对采集的模型利用Context Capture软件进行了处理, 建立了坐标与图片对应的野外露头三维数字化模型。利用野外露头三维数字化模型全局性、系统性及连续性的优势, 设置了15口虚拟井点, 结合人工野外考察进行了研究区地质知识库的统计和分析, 建立了储集层成因、砂体连续性与规模、砂体数量与相对比例、砂体几何形态和地质统计学变差函数的统计参数表, 然后, 对典型露头区进行三维地质建模研究。野外露头内部三维地质建模研究主要流程分为骨架网格模型建立、地层-构造模型建立、一次岩性随机模拟及二次平面约束岩性随机模拟等过程, 一次模型利用序贯指示模拟方法随机模拟研究区内部砂体的分布规律, 力图把露头区的剖面数据信息转换到平面, 在生成的砂岩百分含量等值线平面图的基础上, 建立了岩性的平面约束范围(作为二次模拟的约束), 以此结合随机模拟对研究区进行二次岩性模拟。结果分析表明, 最终岩性模型非常符合已有的地质认识。
八旋翼无人机(图2-a)倾斜摄影时, 相机搭载5个拍摄传感器(图2-b), 分别从1个垂直和4个倾斜角度同时采集物体各方的影像。倾斜摄影技术拍摄后的模型, 具有如下特点: (1)资料精度高、连续系统性强; (2)工作效率高(巡航速度60ikm/h); (3)资料利用率较高; (4)定量化程度高, 测量误差小; (5)对比人工考察危险性大大降低, 地质解释合理性增强。
 | 图2 无人机和倾斜摄影相机 A— 八悬翼无人机; B— 五镜头倾斜摄影相机Fig.2 Photographs of unmanned aerial vehicle(UAV)and oblique camera |
利用无人机搭载倾斜摄影相机野外露头采集的过程中, 主要获取的是高精度像(照)片数据和POS(Positioning and Orientating System, 定位定向系统)数据, 其中POS数据是集动态 GPS 定位技术和惯性导航系统于一体的航空摄影测量系统, 影像的空间位置可由GPS测得, 影像的角元素可由陀螺系统来测量。采集数据是通过空中无人机沿预设的巡航路线, 在既定点(拍照关键点)拍照所得(图3)。
 | 图3 山西吕梁市坪头乡剖面无人机倾斜摄影三维露头模型Fig.3 3D outcrop model processed by UAV oblique photography of Pingtouxiang section in Lü liang City, Shanxi Province |
因此, 最终采集得到的数据是在关键点拍摄的影像、纬度、经度及海拔数据表。与此同时, POS数据还自动记录了一些辅助信息, 例如相机自身状态信息(包括拍摄宽度、高度、焦距和像素大小)。现场采集结束后对点云数据及图像进行处理, 处理后的模型可准确定位工区野外露头任意位置三维坐标信息(经度、纬度和海拔高程)(印森林等, 2018), 露头岩性体长、宽和厚的规模也得以彰显。除此之外, 处理后的三维露头模型可以任意视角查看, 局部露头可放大显示相关细节, 常规分辨率约在5~10 cm。当然, 此模型还可以详细查看人工未考察或考察不到的位置, 大大地提高了野外露头表征的定量化程度, 工作效率也得以大幅度提升。
三维地质建模结果是否精确与对目标地质体的精细表征与认识关系较大, 即地质知识库的建立关系密切。从地质建模基础数据获取的角度来说, 传统方法获取系统准确的野外露头定量数据十分困难, 亟需借助新的数据获取技术方法。
本次研究地质知识库主要通过对地质体的沉积成因、沉积规模、空间形态和展布规律等总结认识和统计分析, 建立表征储集层特征的地质知识。这些地质知识或直接作为输入参数参与储集层随机建模, 或作为随机模拟方法及选择随机模拟方法的依据, 或为模拟结果的精度分析提供对比数据及地质依据。根据在建模过程中的作用不同, 可以分为模拟算法所需的知识库和模型分析检验知识库, 前者以定量参数为特征, 后者则以定性的地质描述为主。表征储集层骨架模型参数的一级参数主要有储集层成因、砂体规模与连续性、砂体数量及砂体几何形态等, 表征地质统计一级参数为变差函数与训练图像。
3.2.1 虚拟井点岩性与层位刻画
本次无人机飞行区域范围约0.6 km2, 从露头建模的角度来说范围偏大, 因此, 在总览分析处理后的野外露头模型后, 依据出露条件和出露区地层/砂体对比条件2个因素, 选取了典型露头区小范围区域开展三维建模。首先, 利用虚拟井位进行地层及砂体标定。选择了平面分布相对均匀的井位15口, 位于典型区块的边部, 按照顺序进行了命名(井号1-15)(图4), 对设定的井位进行岩性的精细刻画描述。当然, 本次为了重点突出地质建模效果, 主要对砂岩、泥岩及煤等3种类型的岩性进行了描述。利用已经采集的模型及设置的虚拟井点的数据, 对研究区进行小层的精细对比分为PTX-h3、 PTX-h2、 PTX-h1 层面, 对应2个小层(层名PTX-h3、PTX-h2)。
 | 图4 山西吕梁市坪头乡剖面典型露头区虚拟井点设置Fig.4 Virtual well points setting of typical outcrop area of Pingtouxiang section in Lü liang City, Shanxi Province |
3.2.2 储集层骨架模型参数
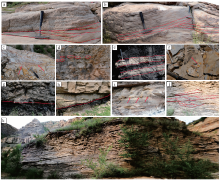
1)储集层成因。根据研究区实际情况, 利用相标志开展研究区沉积相类型的识别(图5)。同时, 结合申文敏(2013)、邢永生等(2017)研究, 认为该区目的层太原组主要发育障壁海岸沉积体系, 又可进一步识别出潮坪和障壁岛2种沉积亚相。其中潮坪作为该区广泛发育的沉积亚相, 可识别出砂坪、泥坪、混合坪、碳酸盐潮坪和泥炭沼泽5种沉积微相。综合研究认为目的层主要发育了2种大相类型即三角洲和陆源障壁海岸, 亚相类型分别为三角洲前缘和三角洲平原以及潮坪、潟湖、障壁岛和沼泽(表1)。
 | 图5 山西吕梁市坪头乡剖面沉积相标志 a— 褐灰色厚层状含砾石砂岩, 砾石分布集中, 分选磨圆较好(点号60); b— 褐灰色厚层状砂岩, 槽状交错层理发育(点号62); c— 粉砂质泥岩、黏土岩夹灰白、灰黄色细— 中粒石英(杂)砂岩, 发育变形构造(点号63); d— 碳质页泥岩, 可见铁质结核(点号66); e— 煤层中夹灰白色细砂岩(点号70); f— 灰白色页岩, 含黄铁矿, 见植物根茎化石(点号80); g— 黑色碳质页岩夹煤(点号82); h— 上部为褐灰色厚层砂岩, 底部为煤层, 水道透镜体发育(点号92); i— 中— 细砂岩底部呈层状分布的底砾岩(点号162); j、k— 中— 细砂岩, 楔状交错层理、羽状交错层理和槽状交错层理发育(点号114)。层位:a— e, 下二叠统太原组; f— k, 下二叠统山西组Fig.5 Sedimentary facies marks of Pingtouxiang section in Lü liang City, Shanxi Province |
| 表1 储集层沉积相及岩石类型 Table1 Sedimentary facies and rock types of reservoirs |
2)砂体连续性与规模。表征砂体连续性与规模的主要参数包括砂体平均厚度、最大厚度、宽度和宽厚比等。露头区沉积相为陆源障壁海岸相与三角洲相, 砂体主要类型为砂坝、分流河道、河口坝等骨架砂体类型。利用无人机采集处理后的模型对不同类型砂体进行测量(图6-a), 选取典型剖面位置分析自下而上发育了陆源障壁海岸到三角洲沉积相的沉积过程, 骨架砂体包括障壁砂坝、分流河道和席状砂等成因砂体。利用高斯模糊化在图像处理技术, 把某一点的RGB值按高斯曲线统计起来, 再采用加权平均的数学统计方法得到这条曲线的RGB值, 即每一个RGB值都取周边的RGB的平均值从而得到有用特定图像信息的增强。利用在CorelDraw软件对研究区剖面图像进行去噪及模糊化处理(图6-b),
 | 图6 山西吕梁市坪头乡剖面无人机扫描剖面砂体分布 a— 无人机野外露头剖面; b— 高斯模糊化野外露头剖面; c— 野外露头岩性分布数据Fig.6 Sand body distribution based on UAV scanning method of Pingtouxiang section in Lü liang City in Shanxi Province |
可见色彩突变变得平滑渐变, 且此种模糊处理更好地保留了边缘效果, 结合实际考察结果, 对研究区的虚拟井点进行了岩性的识别(图6-c)。同时, 结合无人机倾斜摄影测量数据, 可以比较准确地获取相关知识库的数据(表2)。其中研究区障壁砂坝发育程度最高, 平均厚度1.68~5.10 m, 最大厚度2.05~7.49 m, 最大可见宽度31.50~100.80 m, 推测最大宽度70.00~260.00 m, 宽厚比18.75~30.51; 分流河道、席状砂、远砂坝厚度及宽度顺次减小, 而宽厚比增大。
| 表2 山西吕梁市坪头乡剖面砂体连续性与规模数据 Table2 Data showing scale and continuity of sand bodies in Pingtouxiang section in Lü liang City, Shanxi Province |
3)砂体数量与相对比例。表征砂体数量的参数主要包括全局百分比、分段百分比和厚度级别百分比。通过对研究区设定虚拟井位的岩性描述来分析研究区的砂泥岩的比例。研究区砂岩全局百分比为46.22%, 整体来说, 泥岩的含量要高于砂岩。研究区砂体厚度与数量统计表明, 出露砂体总厚度为2.2~18.2 m, 泥岩厚度1.9~22.4 m, 砂体总个数为30个(表3), 其中单砂体厚度0.7~12.2 m。
| 表3 山西吕梁市坪头乡剖面砂体数量及厚度统计 Table3 Statistics of sand body numbers and thickness of Pingtouxiang section in Lü liang City, Shanxi Province |
4)砂体几何形态。砂体平面几何形态受控于沉积环境。不同沉积环境形成的砂体, 一般都具有其各自的几何形态。砂体的剖面几何形态不仅有助于研究者判断沉积环境, 而且是研究者确定砂体叠置及连通关系应遵循的依据。因此, 砂体几何形态是表征沉积体的重要参数, 露头区砂体剖面几何形态主要有楔状或板状、平板状和板状等3种类型(表2), 对应了不同成因类型的砂体。
3.2.3 地质统计学变差函数
对典型露头区不同岩相变程、基台值、方向等地质统计学参数按照设定的2个层位进行了数据统计(表4)。对1000多对数据样本的变差函数分析发现, 其中砂岩的变程范围在184.3~206.8 m, 次变程55.3~105.4 m, 垂向变程6.5~7.3 m, 主方向为33° ~78° , 次方向303° ~348° , 基台值为0.95; 泥岩主变程132.3~194.0 m, 次变程44.3~75.6 m, 垂向变程4.1~4.9 m, 主方向197° ~268° , 次方向107° ~178° , 基台值为1.10。
| 表4 山西吕梁市坪头乡剖面地质统计学变差函数参数 Table4 Geostatistics parameters of variogram of Pingtouxiang section in Lü liang City, Shanxi Province |
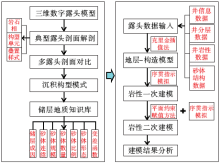
在充分获取无人机的三维信息后, 利用已有的Petrel建模软件, 开展基于无人机倾斜摄影数据的露头区内部结构的建模和预测。包括野外露头剖面井点设置、地层-构造模型建立、野外露头岩性数据的获取等步骤。具体流程包括2个主体部分, 即基于三维数字露头模型为基础的地质知识库建立和基于地质知识库的三维露头内部地质建模; 以三维数字露头模型开展典型露头的解剖、多剖面对比、沉积构型模式及地质知识库(储集层成因、砂体连续性、砂体规模、砂体数量、砂体比例、砂体形态和变差函数)等研究。上述数据分析为露头三维建模提供了较好的数据输入信息, 随后为建立地层-构造模型、岩性一次建模、岩性二次建模和结果分析等步骤(图7)。
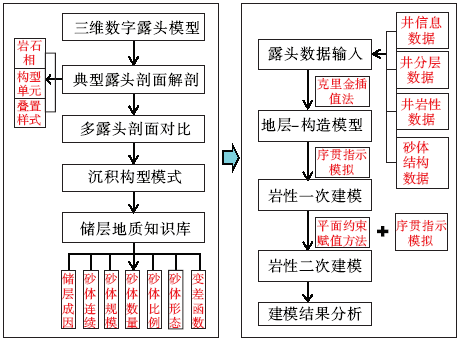 | 图7 山西吕梁市坪头乡剖面基于无人机倾斜摄影数据的野外露头三维建模流程Fig.7 Workflow of 3D outcrop geological modeling with UAV oblique photography data of Pingtouxiang section in Lü liang City, Shanxi Province |
4.2.1 虚拟井位信息数据转换
对比传统的露头考察方法, 无人机倾斜摄影处理模型最大的优势是研究区任一点坐标可以获取。前已述及, 本次研究选取了研究区的15个点X坐标、Y坐标以及深度数据(表5), 为三维地质建模奠定了硬数据基础。
| 表5 山西吕梁市坪头乡剖面虚拟井坐标信息数据 Table5 Coordinate data information of virtual wells of Pingtouxiang section in Lü liang City, Shanxi Province |
4.2.2 井点岩性数据
在井点设置后, 结合露头野外现场工作描述划分不同深度段的岩性, 并用相应的代码来代表(目的层主要分为砂岩、泥岩), 确定不同井段的岩性类型, 作为建模软件的输入数据(表6)。
| 表6 山西吕梁市坪头乡剖面虚拟井岩性数据 Table6 Lithology data of virtual wells of Pingtouxiang section in Lü liang City, Shanxi Province |
4.2.3 层面数据
采集处理后的野外露头模型具有海拔数据, 结合人工野外考察对野外露头出露地层进行分层, 对应于地下井位的深度值。利用海拔值对研究区的3个层面数据(PTX-h3、PTX-h2、PTX-h1)进行标定(表7)。
| 表7 山西吕梁市坪头乡剖面虚拟井分层顶部深度数据 Table7 Stratum tops data of virtual wells of Pingtouxiang section in Lü liang City, Shanxi Province |
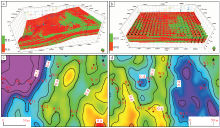
利用Pillar gridding、Make horizon和Layering模块, 建立了研究区的三维骨架模型(图8-a)、地层-构造模型(图8-b)。模型较好地反映了东北高、西南低的构造特点, 而内部小层具有相似的特点, 地层倾角较小约3° ~5° , 同时, 反映了露头区出露的地层产状。
 | 图8 山西吕梁市坪头乡剖面典型露头区三维地层-构造模型(位置见图3) a— 三维骨架网格; b— 地层-构造模型Fig.8 3D stratigraphic structural model of typical outcrop area of Pingtouxiang section in Lü liang City, Shanxi Province(location in Fig.3) |
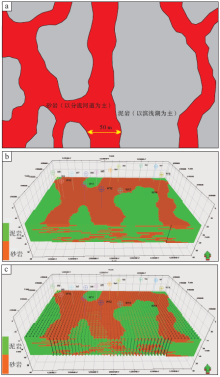
在前述研究储集层地质知识库研究基础上, 包括岩石的形态、规模、方向及砂体的叠置关系等, 井数据为约束, 利用Petrel建模软件的Data Analysis 与Facies Modeling模块开展地质建模研究, 利用序贯指示模拟算法, 对坪头乡剖面典型露头区进行了50次随机模拟的地质模型对结果进行比对, 优选了其中1个整体模式较符合已有地质认识的模型如(图9-a、9-b)所示。
 | 图9 山西吕梁市坪头乡剖面典型露头区三维岩性模型及砂体分布特征 a— 岩性三维模型; b— 岩性三维栅状图模型; c— PTX-h3层砂岩含量; d— PTX-h2层砂岩含量Fig.9 Lithologic 3D modeling and sand body distribution of typical outcrop area of Pingtouxiang section in Lü liang City, Shanxi Province |
其中, PTX-h2层砂体呈叠置分布明显, 砂体宽度约为50~200 m(图9-c), 其中1、2、3、5、6、7和8井位于支流间湾微相, 9、10、11、12、13、14和15井位于障壁砂坝微相。PTX-h3层砂体平面河道形态明显, 河道宽度约为50~80 m(图9-d), 其中1、5、10、11、12和15井中部整体发育程度高位于分流河道微相, 2、3、4、6、7、8、9、13和14井位于分流河道间微相。显示了研究区砂体自下而上由河口坝过渡为分流河道的特点。
传统野外露头数据信息用于三维野外露头建模, 其中一个重要的不足在于野外露头剖面的数据不能向平面转换, 导致平面的沉积相模型缺乏约束, 当采用无人机倾斜摄影技术后, 多剖面的数据向平面转化有了条件。本次研究在岩性一次随机建模(序贯指示模拟)的基础上, 得到了岩性模型为基础的砂体平面分布, 其作为二次建模的平面约束, 使得野外露头三维建模有了更好的控制条件。利用平面约束赋值结合井点硬数据随机模拟方法, 可以较好地表征研究区成因砂体的分布特征。
根据岩性一次模型的砂岩厚度等值线图, 较好地展示了成因砂体的形态及规模, 以此为基础, 抽象出可以表征成因砂体的平面分布特征图(图10-a), 图中以分流河道为主的砂岩成窄条带状交叉分布, 结合前述储集层知识库的分析, 确定单一分流河道成因砂体规模约为50 m。然后, 依据井点的数据结合平面分布范围, 利用序贯指示模拟方法, 对研究区不同层(zone)的砂体平面分布进行了模拟, 建立了新的具有成因意义的野外露头三维地质模型(图10-b、10-c)。不同层砂体的分布具有相似形态, 图11-a、11-c为2条分叉型砂体分布, 图11-b、11-d为局部连通而整体分叉的砂体分布, 其规模和分布存在差异的特点, 较好地体现了确定性与随机性结合的随机模拟算法。
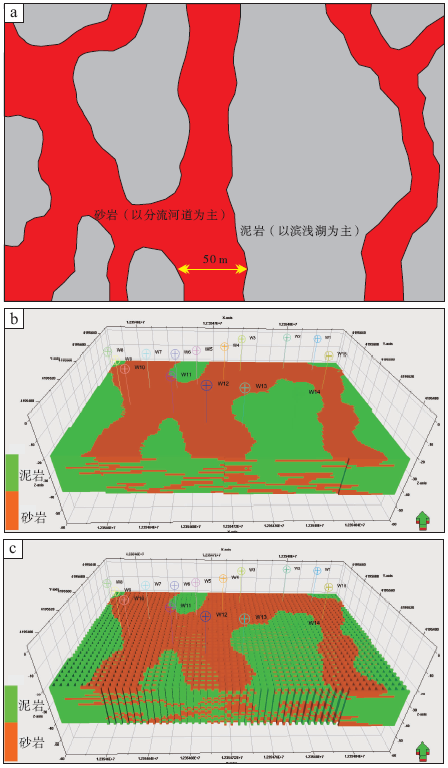 | 图10 山西吕梁市坪头乡剖面平面成因砂体约束下野外露头二次建模 a— 平面砂体分布; b— 三维野外露头成因砂体模型; c— 三维野外露头栅格模型Fig.10 Secondary outcrop modeling with restraint of planar genetic sand bodies of Pingtouxiang section in Lü liang City, Shanxi Province |
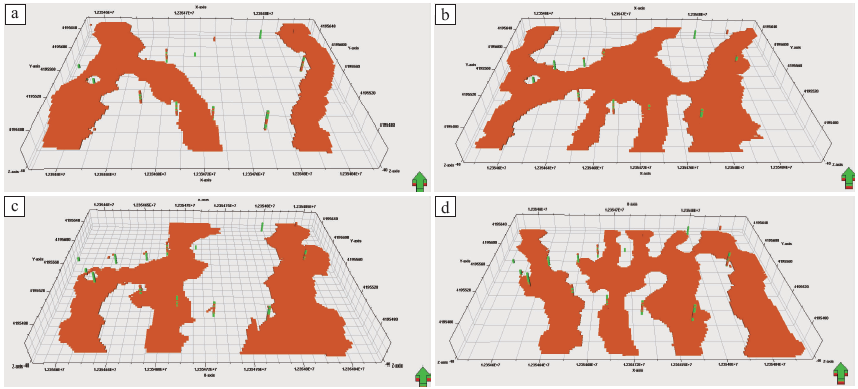 | 图11 山西吕梁市坪头乡剖面三维模型不同层成因砂体分布 a— k=5; b— k=10; c— k=15; d— k=20(k为三维模型中细分层的编号, 由上向下, 编号依次增大)Fig.11 Planar distribution of genetic sand bodies of different zones in 3D modeling of Pingtouxiang section, Lü liang City, Shanxi Province |
通过上述研究及建模工作, 对得到的模型进行对比分析(表8)。模型参数对比发现, 一次模型砂岩比例最高, 与知识库统计结果相差1.89%, 二次模型砂岩比例最低, 与知识库统计结果相差4.5%; 砂体个数相差不大, 最小厚度、均值、最大厚度和方差模拟的结果与地质知识库统计结果差异均不大, 总体说明了模型比较可靠。
| 表8 模型的对比验证 Table8 Comparison and validation of models |
基于坪头乡露头剖面无人机采集数据地质知识库的建立, 结合以上应用效果, 说明对于本区域以及其他区域相似油藏的研究均具有推广意义。在几近相同的沉积背景下, 以无人机倾斜摄影为基础, 精细表征野外露头为原型模型, 通过对原型模型的深层次剖析并结合无人机三维定量信息, 建立野外露头的三维地质模型, 对指导类似油气藏的开发生产和降低类似油藏开发风险具重要指导意义。
以建立三维地质模型更加逼近地下真实的视角来看, 多年来建模人员一直期待有平面约束的建模信息来辅助三维模拟实现, 然而传统露头难于实现把多个关联的非规则剖面数据转换为平面数据, 这大大影响了野外露头的高精度、可视化数据在三维地质建模中的应用效果。另一方面, 模型是否精准与建模人员对研究区地质知识库的经验关系密切。近年来, 地质知识库从2个方面取得了较大的进展, 其一是地质知识库定量数据的获取技术, 其二是储集层井间预测(即储集层三维地质建模)算法, 特别是多点地质统计学建模方法迅速发展(尹艳树等, 2011; 喻思羽等, 2017), 如何更加精准地获取训练图像成为了研究的热点和难点(张文彪等, 2015), 究其本质依然是地质知识库的定量化(尹艳树等, 2011; 张文彪等, 2015), 而地质知识库的获取需要信息化与定量化程度更高的数据, 利用无人机倾斜摄影的方法为训练图像的获取打开了一扇新的大门。
通过上述研究表明, 基于无人机倾斜摄影的野外露头三维建模技术3点优势是常规野外露头考察不具备的, 包括:(1)加强了数据信息的定量化程度, 奠定了野外露头三维建模的基本数据框架; (2)三维数字露头模型中坐标与岩性的统一关系改善了野外原始的人工记录的工作模式, 使得地质体连续表征得到了定量数据支撑, 地质体非规则形态得以更加真实的呈现, 对原型模型的认知更加可靠; (3)剖面地质信息向平面信息的关联转化, 增加了建模的输入数据, 成为重要且可靠的约束条件, 改变了常规露头剖面数据难以向平面数据转化而导致认识的片面性。
当然, 进一步分析发现, 目前基于无人机倾斜摄影的野外露头三维建模技术至少还需要在以下方面进一步加强研究: (1)图像与岩性的自动转换识别技术, 无人机巡航采集野外露头剖面数据量较大, 仅仅通过人工对比标定岩性及地层界面显然不现实, 需要进一步完善图像与岩性的自动转换, 快速识别三维数字露头区岩性; (2)无人机倾斜摄影数值露头模型本质还只是准三维(二维非规则曲面)模型, 需要对采集的二维非规则曲面模型进行三维网格化转换, 以实现利用任意精度来表征露头区的地质特征; (3)改进野外露头建模算法, 通过无人机定量化与可视化的优势, 建立符合研究区的训练图像, 以开展多点地质统计学建模研究。
1)利用无人机倾斜摄影技术采集了研究区数据模型, 模型三维坐标(经度、纬度、海拔)及对应图像信息精度较高(5~10 cm), 可以准确定位并测量任意位置坐标, 为建立准确的储集层地质知识库奠定了良好的基础。
2)对露头区储集层骨架模型参数与地质统计学参数进行了统计, 建立了典型露头区储集层地质知识库。研究区主要发育了2种三角洲和陆源障壁海岸, 亚相、微相类型多样。
3)以露头区储集层地质知识库为基础, 在虚拟井位设置、岩性标定的基础上, 建立了典型露头区三维地层-构造模型和2套岩性模型。岩性二次模型较好地反映了东北高、西南低的构造特点, 而内部小层具有相似的特点, 地层倾角较小约3° ~5° 。模型对比研究表明, 二次模型平面上砂体分布与已有认识基本吻合, 整体符合工区地质特点。模型中PTX-h2层砂体与PTX-h3层砂体形态与规模得到了较好的表征。
作者声明没有竞争性利益冲突.
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
|
| 29 |
|
| 30 |
|
| 31 |
|
| 32 |
|
| 33 |
|
| 34 |
|
| 35 |
|
| 36 |
|
| 37 |
|
| 38 |
|
| 39 |
|
| 40 |
|
| 41 |
|
| 42 |
|
| 43 |
|
| 44 |
|