
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
大坡度地质露头高分辨率无人机影像采集方法与建模实践*
[盛辉 , 段政明, 刘善伟, 曾喆, 冯建伟]
, 段政明, 刘善伟, 曾喆, 冯建伟]
, 段政明, 刘善伟, 曾喆, 冯建伟]
|
|

第一作者简介 盛辉,男,1972年生,毕业于武汉大学,现为中国石油大学(华东)海洋与空间信息学院副教授、硕士生导师,主要从事摄影测量与遥感在地学中的应用等方面研究。E-mail: sheng@upc.edu.cn。
野外地质露头的观察、研究能够最直接、最有效地获取地下地层信息,为地质科学研究提供最直观、最真实的一手地质资料。然而传统的露头研究,尤其针对大坡度、人员无法到达区域的露头研究,主要依赖坡底部考察、测量和拍照等方式记录露头信息,难以精细、准确地表征整个地质体。消费级无人机具有机动性好、适应性强和成本低等优势,且能够近距离、多视角、变高度地获取露头影像。本研究对无控制点情况下的大坡度地质露头影像采集方法与模型构建精度进行探讨,利用消费级无人机垂向航线采集影像,然后构建模型。结果证明倾斜摄影测量技术结合消费级无人机能够有效地构建具有毫米分辨率精度的大坡度地质露头模型。构建的模型具有分辨率高、分辨率均一、量测精度可达毫米等特点,可有效降低野外考察的工作难度,降低人员安全风险,真实准确地复现野外大坡度露头情况,为大坡度露头剖面解译、分析和量测提供真实可靠的数据基础。
About the first author Sheng Hui,born in 1972,is an associate professor of the College of Oceanography and Space Informatics of China University of Petroleum(East China). He is currently engaged in photogrammetry and remote sensing. E-mail: sheng@upc.edu.cn.
The observation on the outcrop in the field is one of the most direct and efficient methods to obtain the underground formation information, which provides the most direct first-hand geological data for geological science research. However, the traditional outcrop investigation, especially for the outcrop with a large slope and unreachable area, mainly relies on the inspection, measurement of the slope bottom, and photos to record outcrop information, making it difficult to accurately characterize the whole geological body. Consumer unmanned aerial vehicle (UAVs) with the advantages of good mobility, strong adaptability and low cost, can obtain outcrop images from a short distance, multiple perspectives and varying heights. In this paper, the image acquisition method and model construction accuracy without control points available for the geological outcrop with a large slope are discussed. Consumer UAVs is used to capture images through vertical route and then the geological model is set up. The results show that oblique photogrammetry technology combined with consumer UAVs can effectively build a large slope geological outcrop model with millimeter resolution. The model has the characteristics of high resolution, uniform resolution and high measurement accuracy up to millimeter, which can effectively reduce the difficulty of field investigation and the personnel safety risk, thus it accurately reproduces the outcrop situation with large slope in the field, providing a real and reliable data basis for the section interpretation, analysis and measurement of large slope outcrop.
地下岩体、地层和矿床等露出地表后形成野外地质露头, 其中蕴含有丰富的地质信息。对野外地质露头的观察、研究能够最直接、最有效地获取地下地层信息, 为地质科学研究提供重要的资料(刘学锋等, 2015)。随着三维建模技术的日渐成熟, 地质露头三维模型因能够真实还原地质露头野外场景而得到较快发展, 是地质考察领域的研究热点和发展趋势。
早期地质露头建模方法主要利用地面三维激光扫描仪采集地质露头的点云信息, 并结合相机采集的照片构建地质露头三维模型(刘学锋等, 2015)。但由于三维激光扫描仪价格昂贵、操作复杂、存在较大盲区且野外架设困难, 难以得到广泛应用(朱凌和石若明, 2008; 邱亚辉等, 2019)。计算机和倾斜摄影测量技术的进步, 使得利用影像数据构建地质露头模型成为可能。目前国内印森林等(2018)采用工业级无人机搭载五镜头倾斜相机, 建立了山西坪头乡局部的地表三维模型, 用于地质露头研究。但因航高固定导致模型的地表空间分辨率随地形起伏而变化较大(5~10 cm), 无法分辨和识别细砾岩、砂岩、裂缝和小型纹理等地质现象。万剑华等(2019)利用多旋翼无人机和相机结合构建新疆一间房等地露头模型, 模型分辨率较高, 但是未对露头精度进行相关验证。
本研究针对大坡度、人员无法到达区域地质露头的影像采集方法与高分辨率模型重建问题, 使用小巧、灵活的消费级无人机依照垂向航线进行高分辨率露头影像采集, 对构建的露头模型相对精度进行验证, 实践证明利用消费级无人机对大坡度、人员无法攀爬的倾斜地质露头进行毫米分辨率的模型构建是切实可行的, 完全能够满足地质考察的需求。
当前倾斜摄影测量技术在影像采集过程中多使用固定翼无人机或工业级多旋翼无人机, 搭载5镜头倾斜相机, 其特点是设备成本高、操作难度大且需要经过专业的培训。而消费级无人机成本低廉、操控简便, 搭配地面站软件即可便捷获取影像数据(万剑华等, 2019)。
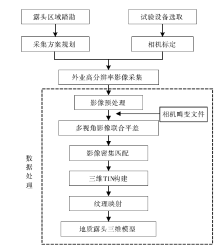
倾斜摄影测量通常利用飞行平台搭载多镜头倾斜相机, 从多个角度采集地物影像(吴熠文等, 2018), 能够更加真实地反映地物实际情况, 满足精细化三维信息获取的要求; 计算机视觉重构技术、并行运算技术和硬件性能的提高, 使得海量、无序、多尺度影像的视觉匹配成为可能(吴波涛等, 2016)。随着视觉匹配算法的发展和三维重建软件的成熟, 可以利用消费级无人机搭载单镜头相机采集的多视角影像进行三维模型重建(图1), 上述技术条件使得利用多视角影像进行地质露头的三维模型重建成为可能(余忠迪等, 2018)。
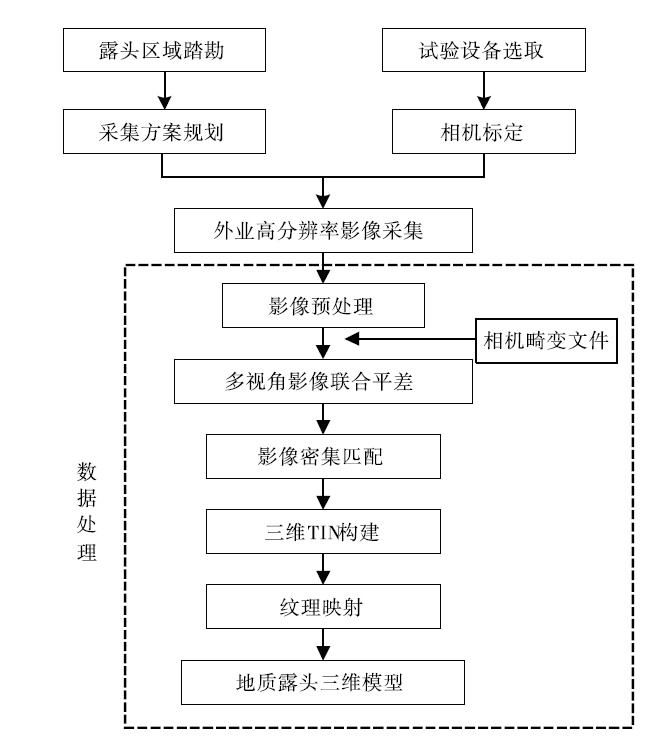 | 图 1 地质露头模型构建流程Fig.1 The construction process of geological outcrop model |
针对具有较大坡度的倾斜露头, 本研究采用单镜头消费级无人机Phantom 4 Pro近距离采集露头影像, 该无人机操控稳定、安全灵活, 且具有视距提示系统和定位系统, 能够确定无人机到露头距离且拍摄的照片具有POS(Position Oriental System)信息; 搭载的三轴云台能够消除飞行中的抖动和颠簸, 有效地避免震动产生的“ 果冻效应” 。搭载的相机视场角84° , 有效像素2000万, 等效35 mm相机标准焦距, f/2.8-f/11带自动对焦功能。
相机标定是倾斜摄影测量构建三维模型过程中的重要步骤, 相机标定的精度直接影响倾斜摄影测量中多视影像联合平差的难度与准确性(王柳等, 2017)。
设备采用Phantom 4 Pro作为图像采集平台, 由于该无人机搭载的相机为非量测型相机, 其内参不确定, 所以需对其相机进行标定。
张正友标定法使用的标定模板制作容易、成本低、使用方便、鲁棒性好且准确率高, 只需要相机从不同方位(至少2个)来观测标定模板, 并且通过标定板上每个特征点和其像平面的像点间的对应关系计算出所需参数、即每幅图像的单应矩阵来进行相机的标定(Zhang, 1999)。通过此方法可快速、方便、准确地得到相机的各内外参数和畸变参数。得到Phantom 4 Pro相机标定参数见表 1。
| 表 1 Phantom 4 Pro相机标定参数 Table1 The calibration parameters of Phantom 4 Pro camera单位: mm |
实验过程中根据大坡度露头的坡度调整相机镜头角度, 根据所需的分辨率确定无人机搭载的相机与露头之间的距离, 距离与分辨率的关系式为:
式中,
无人机垂向飞行速度为:
式中, t为采集时间间隔(单位s);
无人机在每条垂向航带间横向移动距离w计算式为:
在大坡度露头影像采集时, 设计航向重叠75%~85%, 旁向重叠65%~75%; 无人机从大坡度露头一侧底部开始, 保持无人机与岩壁的距离为L, 调整镜头角度, 采用垂向航线以速度v采集影像(图 2), 每条航带间的距离为w, 依次完成整个露头的影像采集工作。
 | 图 2 垂向飞行航线作业图Fig.2 Vertical flight path |
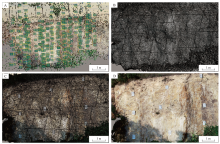
外业采集到的高分辨率的露头影像数据首先基于影像和定位定姿信息(Position and Orientation System, POS)并结合光束法平差进行多视角影像的联合平差, 获取影像的外方位元素; 然后根据多视角影像的内、外方位元素提取多视角影像的同名点坐标, 进行多视角影像的密集匹配, 从而生成地质露头的密集点云(Furukawa and Ponce, 2010); 下一步结合生成的密集点云构建三维不规则三角网(Triangulated Irregular Network, TIN)(Labatut et al., 2007); 最后对三角网进行纹理映射, 得到高分辨率露头三维模型(图 3)。
 | 图 3 模型构建示例图 A— 多视影像联合平差; B— 不规则三角网; C— 纹理映射; D— 三维模型Fig.3 Example of the model construction |
作为实验对象的地质露头位于某城区中的山地公园内, 海拔高度约70 m, 高约5 m, 宽约8 m, 坡度约85° 。露头坡度较大, 表面光洁且无草木遮挡, 周围树木等障碍物较多。
实验使用消费级无人机Phantom 4 Pro按照垂向航线采集方案进行采集, 共采集到312张高分辨率露头影像, 然后经过影像预处理、多视影像联合平差、生成密集点云、构建TIN和纹理映射最终得到高分辨率的露头三维模型(图 4-A)。
 | 图 4 重建模型及标靶 A— 三维模型及标靶分布; B— 标靶板设计Fig.4 Reconstruction of model and target board |
在露头区域内均匀布设9块标靶板(图 4-B), 采用模型测量值与实景真值对比的方法评估模型精度, 包含左上— 右下、垂直、右上— 左下和水平4个方向的精度对比。使用最小刻度1/2 mm的钢尺对标靶板4个方向进行实测, 取10次平均值作为实景真值, 同时在模型上对9块标靶板分别量测4个方向共36个量测值。实验中以标靶板实测值为真值, 与模型上量测值进行对比, 以局部精度评估整体质量, 确定模型精度, 如表 2。
| 表 2 标靶板4个方向量测结果 Table2 Measurement results in four directions of target boards单位: cm |
4个方向上实际量测真值分别为Li(1≤ i≤ 4), 三维模型上4个方向距离量测值为L'i(1≤ i≤ 4), 各距离量测值的与真值差值为:
均方根误差则为:
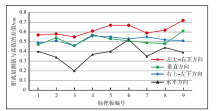
根据表 2数据绘制图 5, 并结合式(4)和(5)统计4个方向精度结果(表 3); 图 5为9块标靶板4个方向上距离量测值与真值的差值折线图, 4个方向中左上— 右下方向差值最大(最大差值为0.72 cm), 水平方向差值最小(最小差值为0.2 cm)且均方根误差也是最小(0.387 cm); 其中水平方向在3、7号标靶处存在较大异变, 分析原因为3、7号标靶安放位置为露头右上和左下2处最边缘位置, 该处影像少且解算难度大, 增大了其误差变形的可能, 模型4个方向的距离量测值与真值的差值大小总体具有较好一致性, 差异不大(表3)。所构建大坡度地质露头模型的分辨率精度可达到毫米, 各方向误差变化较均匀且精度较高。
| 表 3 评估结果统计 Table3 Statistics of evaluation results 单位: cm |
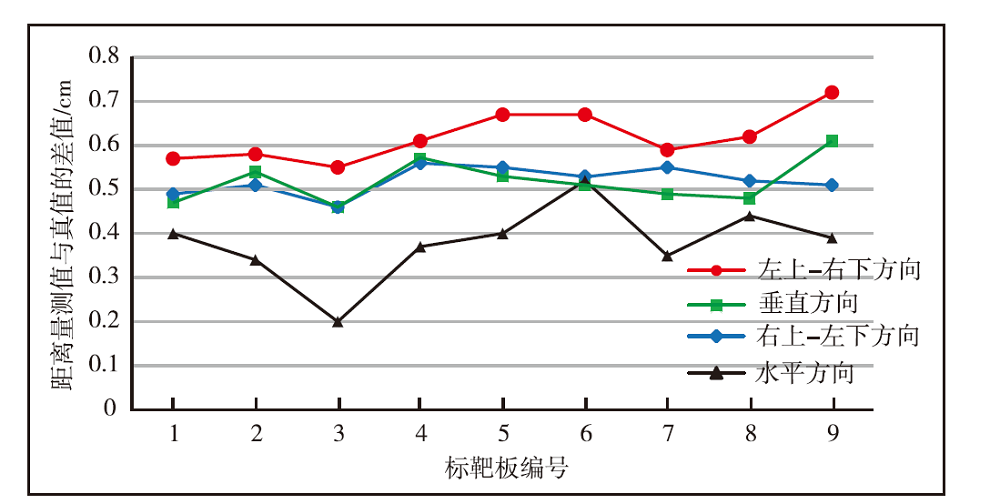 | 图 5 标靶板4个方向距离量测值与真值的差值Fig.5 The difference between the distance measurement values and true values in four directions of target boards |
滦平盆地位于河北省承德市境内, 构造位置位于燕山构造带的尚义— 平泉断裂和丰宁— 隆化断裂之间, 盆地呈NE-SW走向, 整个盆地面积约800 km2, 长约40 km, 宽约20 km(武法东等, 2004)。使用本研究方法对河北滦平地区一处地质沉积露头(位于东经117.411841° , 北纬40.9940514° )进行实际建模应用。经过踏勘发现该露头范围大、坡度陡、落差高, 坡度约82° , 高约20 m, 长约70 m, 离地高度约25 m, 人员无法攀爬, 无法对整个露头进行有效的近距离考察分析。
实际对野外地质露头进行影像采集, 构建毫米分辨率露头模型。得到的露头模型纹理清晰, 各类断裂特征明显, 地质人员可以在合理的角度对整个沉积岩层进行剖面解译、分析和高精度量测, 真实可靠且形象直观, 为野外地质考察提供了极大的便捷。
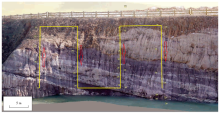
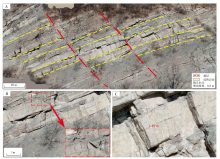
滦平扇三角洲为晚侏罗世— 白垩纪形成的小型断陷湖泊内的陡坡近源三角洲沉积体, 当时的气候多为半干旱型(刘策等, 2017), 通过该沉积露头的高分辨率三维模型可以初步观察到, 构造上的岩性为砂泥岩互层, 砂岩中含有大量的中细砾岩及砾石, 图中黄色虚线为沉积岩层, 红色虚线为2处明显产生位移的断层, 露头倾向约为264° , 倾角约22° , 岩层厚度最大处约1.19 m(图6)。
 | 图 6 野外露头案例应用 A— 模型剖面解译; B— 模型高分辨率细节; C— 岩层厚度量测Fig.6 Case application of field outcrop |
本研究对基于倾斜摄影测量技术的大坡度、人员无法到达的重点区域地质露头高分辨率影像采集方法及毫米分辨率、高量测精度三维模型重建方法进行研究, 并通过实验证明消费级无人机与倾斜摄影测量结合构建的大坡度地质露头模型距离量测能够达到毫米级量测精度, 完全能够满足地质领域对于地质露头的研究需要。同时针对目前野外露头工作中存在的无法将露头区域多个不规则(走向不一致, 海拔不一致, 出露层位不完全相同)的剖面联系起来研究等问题, 后续将会继续探讨实验, 继而实现整体大范围区域的厘米级露头模型与局部小范围区域毫米级露头模型的融合建模, 实现整体局部结合、粗细结合、高低结合的露头模型构建, 减少地质研究的不确定性。可预见高分辨率数字地质露头模型构建将会是地质考察工作的一个重要发展趋势, 实现露头从野外到室内的真实复现, 为地质露头的考察、研究和教学等工作提供了有利的支撑。
(责任编辑 李新坡; 英文审校 刘贺娟)
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|